
Asynchronous & Concurrent Programming
2024-02-26
{kind=link}
Typically, a program follows a single thread of execution. This is described as synchronous code execution, in which instructions are executed sequentially upon the completion of the previous operation. There are two common scenarios in which multiple threads of execution can be of benefit:
A program must wait for the completion of some external process, such as an IO operation or the response from an API request.
An expensive, time-consuming computation needs processor time. In this case, the processing is not offloaded from the processor.
In the first case, the CPU is left idle while it waits for an external procedure to occur. This idle time could be spent initiating another operation in the absence of the result of the long-running operation, instead of spinning and wasting processor cycles. This is the default behaviour of JavaScript, which is sometimes referred to as asynchronous or non-blocking.
In the second case, non-blocking program flow is of no benefit as the expensive operations are not offloaded from the processor. Computation must be distributed across many processor cores which can do processing concurrently or in parallel.
Asynchronous Programming
In this example, the delay function simulates a
time-consuming external process. Very little processor time is required
to service the function call.
import time
def delay():
time.sleep(1)
def main():
for _ in range(20):
delay()
if __name__ == "__main__":
main()Timing this program reveals that the apparent execution time is dramatically longer than the combined user and kernel space CPU utilisation.
$ time python sync.py
real 0m20.024s
user 0m0.021s
sys 0m0.000s
$ time python async.pyThis is a good indication that the running time of the program can be improved with multitasking, starting the threads and sending them to the background, periodically servicing them with processor time as required. In Python these threads are not concurrent; no two threads are executed simultaneously on different cores. This is enforced by Python’s Global Interpreter Lock. The illusion of concurrent execution is created by repeated context switching.
import time
from threading import Thread
def delay():
time.sleep(1)
def main():
threads = []
for _ in range(20):
thread = Thread(target=delay)
threads.append(thread)
thread.start()
for thread in threads:
thread.join()
if __name__ == "__main__":
main()The invocation of this improved program has a similar CPU run time,
but much lower effective running time as the remote operations simulated
by the delay function happen simultaneously.
$ time python async.py
real 0m1.029s
user 0m0.022s
sys 0m0.007sPython does support concurrent multithreading by creating multiple
python processes to service a CPU-intensive operation, using the
Process class from the multiprocessing
module.
JavaScript Callbacks & Promises
In the previous example, the join method of each
Thread object is called to ensure that the program only
progresses once all threads have completed. It is essential that the
result of an asynchronous function is available when it is used. One way
to achieve this in JavaScript is the use of callback functions,
which are passed as an argument to a long-running function.
function longFunction(callback) {
callback(37);
}
longFunction((value) => {
console.log(value);
});Predictably, this program outputs 37.
37The value of the previous function is certain to be available in the
callback, unless an error or exception has occurred. Managing the
success and failure conditions for many nested callbacks can become very
difficult. Promises admit two callback functions
resolve and reject to which code can subscribe with
.then and .catch methods.
function longFunction(condition) {
return new Promise((resolve, reject) => {
if (condition == true) {
resolve("success");
} else {
reject("failure");
}
});
}
longFunction(true)
.then((message) => {
// success
console.log(message);
})
.catch((message) => {
// failiure
console.log(message);
});
longFunction(false)
.then((message) => {
// success
console.log(message);
})
.catch((message) => {
// failure
console.log(message);
});This example outputs:
success
failureThis pattern can be simplified further with the async
and await keywords. A promise can only be handled with
await within a function marked as async. If
the promise rejects, the condition is handled by the
catch statement.
async function main() {
try {
let message = await longFunction(true);
console.log("resolve");
console.log(message);
} catch (message) {
console.log("reject");
console.log(message);
} finally {
console.log("finally");
}
}
main();This example outputs:
resolve
success
finallyPOSIX Threads
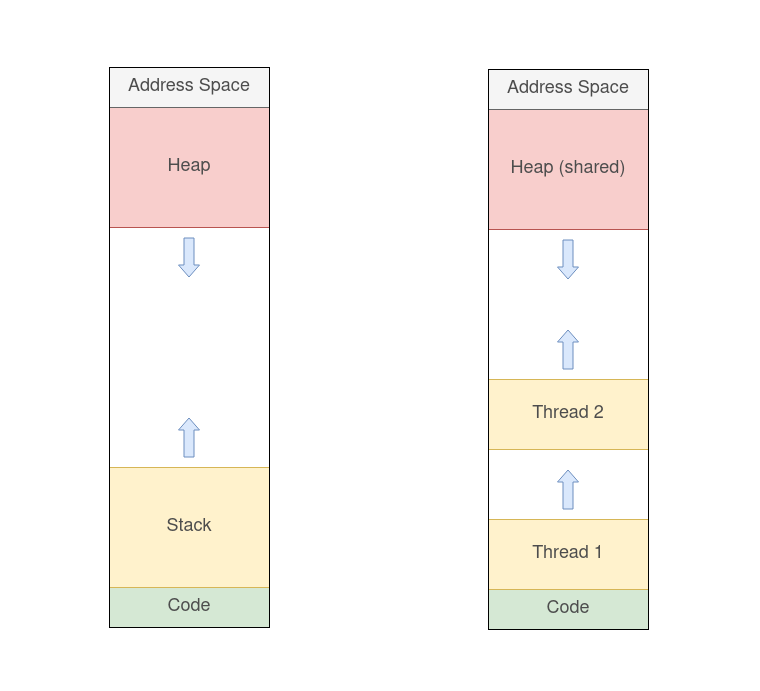
The previous examples do little to accelerate a CPU-intensive operation. In the case that a large volume of work must be completed on a machine with multiple cores, parallel threads can be of benefit. Unlike multitasking, concurrent multithreading does entail multiple threads being executed simultaneously. A thread is similar to a process. Threads have their own context much like a process, but differ by sharing the same address space with one or more other threads of execution. Each thread has its own stack and data stored in this area of memory is sometimes described as thread-local, illustrated in figure 1.
Critical Section
Individual threads can access heap-allocated memory. A critical section is an area of code in which a thread attempts to access a shared resource. The danger of a critical sections is inducing a race condition. A race condition occurs when two or more threads enter a critical section to access a common piece of memory at the same time. If data is shared amongst concurrent threads, access to it must be carefully managed to avoid compromising its integrity. Data structures and algorithms designed to cope with multiple threads are described as thread-safe.
Synchronisation Primitives
Used to prevent these harmful race conditions are a set of low-level mechanisms called synchronisation primitives. Examples include mutex locks, condition variables and semaphores. These are often used to deliver mutual-exclusion or atomicity, guaranteeing that a series of instructions are executed sequentially, without interruption. The improper use of these synchronisation techniques can lead to equally sinister problems, ranging from delayed code execution to deadlock and starvation.
Race Condition
This program demonstrates a typical race condition. The program is
designed to increment the counter variable two million
times. It creates two concurrent threads.
#include <pthread.h>
#include <stdio.h>
static int counter = 0;
void *inc_counter() {
for (int i = 0; i < 1000000; i++)
counter++;
return NULL;
}
int main(void) {
pthread_t t1, t2;
pthread_create(&t1, NULL, inc_counter, NULL);
pthread_create(&t2, NULL, inc_counter, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
printf("%d\n", counter);
return 0;
}The program should output \(2000000\), although it always produces a
slightly different, always smaller number. This situation is caused by
the race condition in the code. The offending line is
counter++. While this appears to be a single operation, it
is in fact three. The assembly language below illustrates this.
mov rcx, [address]
inc rcx
mov [address], rcxEach thread in a program has its own state, which is managed by the
operating system. During execution, it is possible that a thread is
interrupted and its operation is suspended. If this occurs while the
thread is in the critical region, a synchronisation error can occur.
Below is a demonstration of the scenario that could arise in the above
program. Thread t1 is interrupted while it is in the
critical region, leaving t2 free to access the shared
resource. When execution of t1 resumes, it overwrites the
updated value.
| Thread 1 | Thread 2 | Counter |
|---|---|---|
| Read 37 from memory | 37 | |
| Increment to 38 in register | 37 | |
| Interrupted | 37 | |
| Read 37 from memory | 37 | |
| Increment to 38 in register | 37 | |
| Write 38 to memory | 38 | |
| Resumed | 38 | |
| Write 38 to memory | 38 |
In this example, the value of the counter is only updated once, despite the fact that two threads have attempted to incremented its value.
Atomicity
The trace table below illustrates the desired behaviour of the two threads.
| Thread 1 | Thread 2 | Counter |
|---|---|---|
| Read 37 from memory | 37 | |
| Increment to 38 in register | Waiting | 37 |
| Write 38 to memory | Waiting | 38 |
| Read 38 from memory | 38 | |
| Increment to 39 in register | 38 | |
| Write 39 to memory | 39 |
The first advantage of this approach is the inability of the second thread to enter the critical section. The critical section is also executed atomically without interruption. The delay to thread 2 is an example of thread synchronisation , which maintains the state of the shared resource. Here is an updated version of the program demonstrated above, with the race condition addressed by the addition of a mutex lock.
#include <pthread.h>
#include <stdio.h>
pthread_mutex_t lock; // +
static int counter = 0;
void *inc_counter() {
for (int i = 0; i < 1000000; i++) {
pthread_mutex_lock(&lock); // +
counter++;
pthread_mutex_unlock(&lock); // +
}
return NULL;
}
int main(void) {
pthread_t t1, t2;
pthread_create(&t1, NULL, inc_counter, NULL);
pthread_create(&t2, NULL, inc_counter, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
printf("%d\n", counter);
return 0;
}A mutex lock is used to manage access to the critical region that was addressed previously. The term mutex is short for mutual exclusion, which prevents multiple threads accessing a region of code. The call to lock or get the lock does on of two things:
- Obtain the lock if it is not held already, gaining exclusive access to the critical section.
- Spin, waiting for the lock to be free if it is already held.
Once the thread exits the critical section, the lock is released or unlocked. If this is not done at the appropriate time, it is possible that other threads are permanently locked out or deadlock occurs.
Semaphores
The semaphore is another example of a synchronisation primitive. Semaphores serve the dual purpose of delivering atomicity along with the ability to communicate between and synchronise threads. These two roles are otherwise achieved using a combination of locks and condition variables. This is sometimes referred to as an ordering primitive and lends the programmer greater control of the path threads take through the program.
The semaphore is a single number, the value of which is shared
amongst threads and used to send signals to one another. The value that
the semaphore is initially set to dictates its behaviour. Once
initialised, a semaphore is interacted with through two main methods:
sem_post(3) & sem_wait(3).
When sem_wait is encountered, the value of the specified
semaphore is decremented. If this value is subsequently greater
than or equal to 0, the thread proceeds into the critical section. If
the value after being decremented is less than 0, the resource is
considered busy and the calling thread waits. The other main function is
sem_post. Once a thread has completed work in a critical
section, it sends a signal to other waiting threads by
incrementing the semaphore value. This may restore the value to
0 in which case a waiting thread would be able to run.
Here is an example of a semaphore used to order the execution of two
threads, the main program thread and one called
child_thread, demonstrating the proper initialisation of
the semaphore. The main thread should start the child thread and then
wait until the thread has completed. The main thread is
signalled to by the child. To achieve this behaviour, the
semaphore value is set to 0.
#include <pthread.h>
#include <semaphore.h>
#include <stdio.h>
#include <stdlib.h>
sem_t semaphore;
void *child_func(void *arg) {
printf("child entering\n");
printf("child exiting\n");
sem_post(&semaphore);
return NULL;
}
int main(int argc, char *argv[]) {
sem_init(&semaphore, 0, 0);
printf("parent entering\n");
pthread_t child_thread;
pthread_create(&child_thread, NULL, child_func, NULL);
sem_wait(&semaphore);
printf("parent exiting\n");
return 0;
}Consider the result of setting the value to 1. The main thread would be able to progress past the condition, regardless of the child thread’s state. See the trace table below.
| Main Thread | Child Thread | Semaphore Value |
|---|---|---|
| Wait on semaphore | 1 | |
| Decrement semaphore value | 0 | |
| Sempahore value is zero | 0 | |
| Proceeed | 0 | |
| Exit | 0 |
In order to delay the main thread’s exit until the child thread has run, the semaphore should be given an initial value of 0. Decrementing the semaphore value will yield a negative value, and the main thread will be unable to progress. The child thread restores the semaphore value to zero and unblocks the main thread.
| Main Thread | Child Thread | Semaphore Value |
|---|---|---|
| Wait on semaphore | 0 | |
| Decrement semaphore value | -1 | |
| Sempahore value is negative | -1 | |
| Sleep | -1 | |
| Child thread runs | -1 | |
| Child thread posts sempahore | -1 | |
| Increment semaphore value | 0 | |
| Main thread resumed | 0 | |
| Exit | 0 |
It is possible that the child thread runs and increments the semaphore before the main thread begins waiting. It may seem that the signal sent by the child is not received, however a record of it is preserved in the semaphore, ready for the main thread to read.
| Main Thread | Child Thread | Semaphore Value |
|---|---|---|
| Child thread runs | 0 | |
| Child thread posts sempahore | 0 | |
| Increment semaphore value | 1 | |
| Wait on semaphore | 1 | |
| Decrement semaphore value | 0 | |
| Sempahore value is zero | 0 | |
| Proceeed | 0 | |
| Exit | 0 |
With the correct semaphore initialisation, the desired behaviour is achieved.
parent entering
child entering
child exiting
parent exitingSee Also
- GnuPG Usage
- Object Orientation in C
- Functional Programming
- Haskell Programming
- Emacs Initialisation
- Working with Java Packages
- Asynchronous & Concurrent Programming
Or return to the index.